






产品描述
1、设备组成

2、 技术参数
2.1 直流无刷电机对拖平台
技术参数如下:
1)平台由驱动电机(永磁同步电机)、高速精密联轴器、转速/扭矩传感器(选配)、磁粉制动器组成,用于实现电机对拖实验;
2)可以实现速度控制和阻力控制,驱动电机和磁粉制动器以联轴器相连,
3)直流无刷驱动电机:直流无刷电机,额定功率1.5KW,额定线电压48V,额定电流40,额定转矩4.8 NM,额定转速3000 r/min,空载转速4000 r/min,重量 5.5KG,极对数8,霍尔传感器。
4)磁粉制动器:单轴制动,额定转矩50NM,电压24V,额定转速1500 r/min,最大电流1.8A,张力控制器3A。
5)扭矩/转速传感器:转速范围:0-2000rpm,扭矩测量范围:0-200NM;
6)槽钢底座带橡胶垫,电机拖动组总尺寸1000*30*40(长*宽*高)
2.2 电机驱动背靠背变频柜
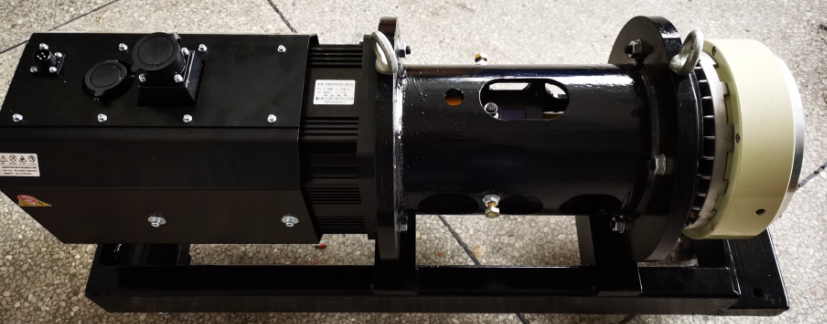
两个PWM变换器各司其职,根据控制算法的不同其功能略有不同。无论哪种算法,定子PWM变换器一般是采用转子磁链定向,控制PMSG的定子电流呈正弦波形实现转速和功率因数调节;并网PWM变换器采用电网电压矢量定向,将直流电逆变为良好的正弦波形实现并网和有功/无功解耦。直流母线电压可以由定子PWM变换器控制也可以由并网PWM变换器控制,保持为比电网幅值高的稳定值(这样才能保证能量流动的方向,PWM整流可以升压)以便往电网输送能量。
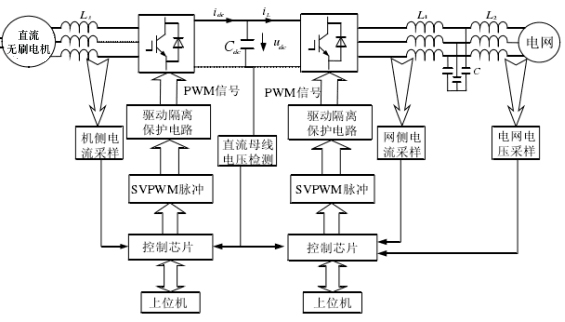
图2 背靠背驱动变流器构架
主控CPU采用目前流行的DSP,型号为TI公司的TMS320F28335,其32位浮点处理能力,非常适用于变流器控制场合。通过传感器分别采集三相交流电流、三相交流电压、直流侧电压、电流以及温度等信息送给DSP,然后DSP经过特定的算法,输出PWM调制波控制开关器件,从而可以实现直流变交流或者交流变直流能量双向流动。除此之外,信号处理电路还预留的外部控制器接口,方便对接RCP控制器。
1、可提供直流输入和交流输入两种方式,交流输入:380V电网,直流输入:电压60V。
2、运行方式,满足三种工作模式:电机驱动模式、变流并网模式、RCP外接控制模式。
3、开放硬件原理图,PCB图(PDF),DSP控制板完整CCS工程源代码(选配)。 4、将Simulink模型与快速原型控制器硬件结合在一起,下载到控制器中执行,控制器运行过程中,此软件可以将Simulink模型中想要查看的各类控制量直观显示,也可以随时修改各类控制参数,让控制器实时响应,从而实现了真正的在线仿真。
5、在线仿真运行界面,采用组态方式,科研者根据自己需求,可以随意添加控件,让科研者将精力放到Simulink建模上面。
6、软件具备三类设置,包括通信IP、板卡的数量设置;PWM设置,主要指示PWM的频率值,死区值,以及动作有效值,编码器精度值等;显示界面设置,用于最终的数据查看以及设置。显示界面中包括遥控、遥调、遥信、遥测、示波器控件。
7、提供电机控制侧的simulink算法模型,控制模型完全开放且可修改,用户可直接使用。
8、具备DSP辅助控制器,配合外围信号采集调理电路、IO驱动电路等组成。

完成以下功能:
·各类信号的采集调理,送给主控制器以及自身使用。送给主控制器目的是实现算法控制,自身采集主要用于对系统的实时保护。
·对IO信号的驱动管理,将主控制器输出信号管理后输出给功率变换电路,实现控制,同时检测系统运行情况,一旦发生错误,通过对IO管理,就可以封闭主控制器的控制信号,从而达到保护系统的作用。这可以保证科研者在建立模型时,即使发生错误控制,也可以保证设备不受损坏。这样可以保证科研者不用顾虑错误而导致设备损坏。
·配合监控软件,可以直观设备查看运行参数。
·本身就可以实现算法控制,用于对比仿真效果
2.3 快速原型控制器——YXSPACE

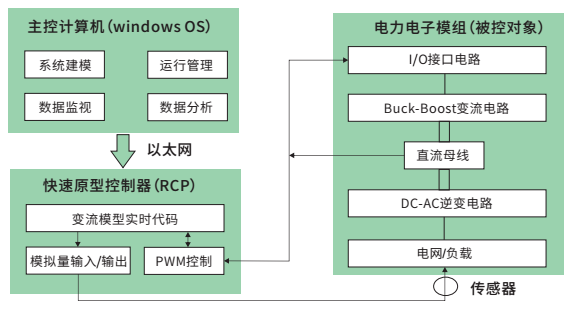
研旭公司推出的YXSPACE产品系列,能够将用户设计的图形化的高级语言编写的控制算法(Simulink)转换成DIDO、AIAO量,完成实际硬件控制。其基本控制框图如下所示:
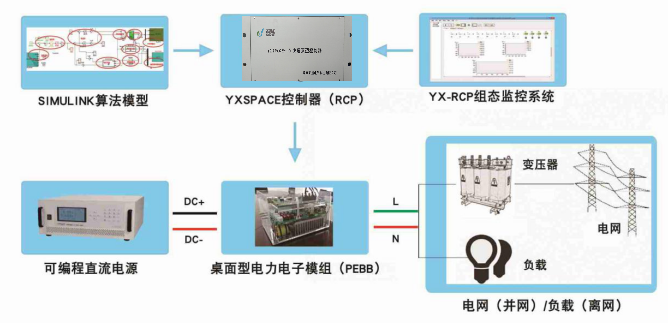
控制算法模型一般采用Matlab中的Simulink工具搭建,将模型中的接口与硬件驱动接口绑定后,再结合TI公司的CCS编译工具产生可执行文件,下载至YXSPACE控制器中运行。
研旭YXSPACE-VIEW2000软件主要用于配置YXSPACE控制器工作模式,同时可以实时监测控制过程中的各类运行量,包括采集量、中间控制变量等。YXSPACE-VIEW2000包括了6类组态控件,分别为遥控控件、遥信控件、遥调控件、遥测控件、示波器控件以及文字编辑控件等。用户可以借助这些控件,直观、方便的搭建监控界面,监控控制器内部运行的详细信息。
3.SP2000控制器资源
研旭SP2000采用外扩插卡式结构,简洁轻便,板卡资源如下:

4.实物图片 :
5.YXSPACE独特优点
(1)采用目前市面成品常用的控制芯片作为CPU,其仿真结果针对实际研究更具有参考性;
(2)在Matlab中设计的控制算法自动生成代码,自动加载到实时目标机中运行,避免了繁琐的编程和Debug工作
(3)使用门槛低,会Matlab仿真即可完成实验测试工作,所有测试工作只需一人即可完成
(4)模型与硬件接口链接简单,只需记住端口编号即可,更不用配置硬件各类细节,免去一切不必要的麻烦;
(5)性价比高,在同等功能的前提下,YXSPACE成本更低。
(6)具备自主编写的驱动库,可以直接导入到Simulink库中,用户可以直接在Matlab软件中拖动相应的硬件元件库,将模型中的数据直接与硬件对接,无需再花费时间去查询硬件映射。8种库文件,可适用于各种工程调试需求。
(7)模型转换文件的透明化,用户可直接查看模型转换后的源码。
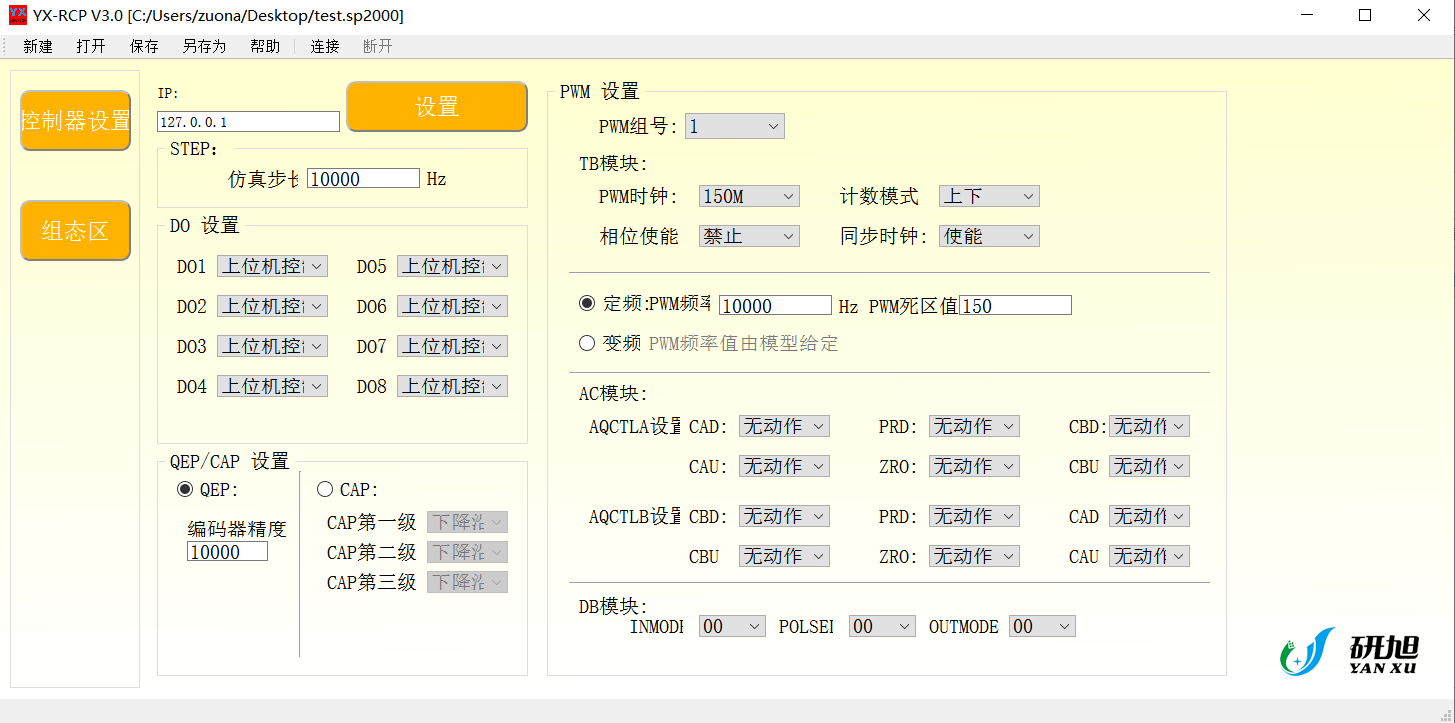
6.YXSPACE-VIEW2000软件
研旭公司专门为SP2000研发了一套上位机监控软件VIEW2000软件。
VIEW2000软件中包含控制器设置以及组态区。其中控制器设置界面共有4类控制器设置,包括仿真步长设置,DO控制源设置,QEP/CAP模式设置,PWM模块设置。
组态区主要包括功能按钮、组态控件、工作区等。
在实际使用中,用户只需用鼠标拖动各类控件,移至工作区当中,位置根据需求随意放置。双击控件即可设置控件的地址号,这样可完成控件与模型或者硬件的建立关系,操作及其简便。
包括如下几类控件:
7.实物案例

微信公众号





