






YXMBD-ZDP5K基于半实物原型开发混合储能制动能量回收控制系统
发布时间:
2023-12-11 16:43
来源:
原创
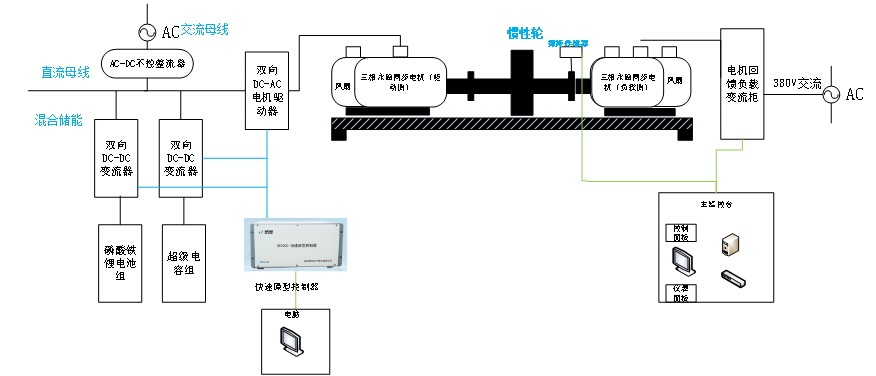
一、设备组成
二、系统组成
系统特点:
- 系统采用真实锂电池储能和超级电容系统,磷酸铁锂电池/超级电容的充电/放电、电池管理系统BMS控制均达到工业储能系统的标准。
- 系统包含双向DC-DC变流器和双向DC-AC变流器,可满足常规的直流母线变流系统和交流母线变流系统;
- 采用对拖机组+惯性轮的机械结构,可以模拟车辆的惯性滑行;
- 可通过控制电机驱动器模拟汽车运行、加速、刹车、加载等功能,可以将制动时产生的能量转化为电能并储存起来;
- 控制器兼具2种控制方式:DSP编程和RCP模型控制(Simulink快速原型开发),两种模式可应用于不同的开发阶段和实验场景,优势互补;
- DSP模式下,可通过C代码编程方式实现变流模块的电能变换、故障保护、UI交互以及模式策略的变更等,熟悉掌握工业控制的开发流程;
- RCP模式下,可通过Simiulink模型配合上位机实时控制系统完成变流模块的控制功能,图形化的控制方式更容易上手,实时交互调试模式使核心算法的调试更为有效便捷;
- RCP一控多,同时控制多个变流驱动器,可实现验证各种算法功能,实时控制,在线调参,提供完整控制模型;
- 提供整体系统的Simulink离线仿真模型,可与实际物理设备一一对应,对比运行效果;
- 整体系统采用开源模式,提供完整的硬件原理图、接口图、DSP软件源代码、Similink完整可运行模型。具备非常灵活的二次开发的基础,方便做各类教学和科研实验。
三、技术参数
3.1 永磁电机对拖平台
技术参数如下:
1)平台由驱动电机(永磁同步电机)、高速精密联轴器、转速/扭矩传感器、加载电机(永磁同步电机)及*监控系统组成,用于实现电机对拖实验,配备大质量惯性轮,可模拟模拟车辆的惯性滑行特性;
2)可以实现速度控制和扭矩控制,驱动电机和加载电机以联轴器相连, 监控系统可以实现人机交互、系统监控功能;
3)驱动电机:永磁同步电机,额定功率5.5KW,额定线电压380V,额定线电流12A,额定转矩 35 NM,额定转速1500 r/min,峰值转矩 70NM,转子惯量8.6,重量 30KG,转矩常数2.9,反电势181,编码器线数2500;
4)负载电机:永磁同步电机,额定功率5.5KW,额定线电压380V,额定线电流12A,额定转矩 35 NM,额定转速1500 r/min,峰值转矩 70NM,转子惯量8.6,重量 30KG,转矩常数2.9,反电势181,编码器线数2500;
5)扭矩/转速传感器(选配):转速范围:0-2000rpm,扭矩测量范围:0-200NM;
6)储能惯性盘,惯量01kg.m2,由钢板加工而成;
7)槽钢底座带橡胶垫,电机拖动组总尺寸1250*30*40(长*宽*高)。
3.2 电机回馈负载变流柜
1、可提供直流输出和交流输入两种方式,交流输入:380V电网,直流输入:电压500V;
2、PWM变换器可以运行,可以根据需要工作在整流状态或逆变状态,能量可以双向流动,定子侧电流和网侧电流的大小和功率因数都是可调的,整个双PWM变换器可以工作在状态;
3、在具体运行中,两个PWM变换器各司其职,根据控制算法的不同其功能略有不同。无论哪种算法,定子PWM变换器一般是采用转子磁链定向,控制PMSG的定子电流呈正弦波形实现转速和功率因数调节;并网PWM变换器采用电网电压矢量定向,将直流电逆变为良好的正弦波形实现并网和有功/无功解耦;
4、通过人机界面或者外部通讯可控制变流器进行转矩控制和速度控制,从而模拟负载端电机的运行状态;
5、具备19寸触控一体机,运行研旭电机负载模拟监控系统,具备功能:驱动电机转速/转矩控制、加载电机转速/转矩控制的功率控制、转速、转矩、功率数据和曲线显示、实验数据存储;
6、变流柜功率5kw,配备工频变压器。
设备参数:
1)最大输入功率:5.5KW
2)输入电源:三相交流380V或者直流500V
3)最大交流电流:20A
4)最高转换效率:94%
5)交流输出电压:380VAC
6)输出频率范围:50HZ
7)交流连接方式: 三相四线
8)输出电流总谐波畸变率:<3%
9)功率因数:>0.99
10)故障清除后 : 3Min
11)隔离变压器:有
12)输出过载保护: 有
13)直流过欠压保护: 有
14)交流过欠压保护:有
15)过欠频保护: 有
16)其它保护: 限流、过流、过热等
17)防护类型/防护等级: IP20
18)散热方式:风冷
19)显示方式:触控一体机
20)通讯接口:RS485/以太网(ModbusRTU)
21)机械尺寸(宽×高×深): 800*1600*600
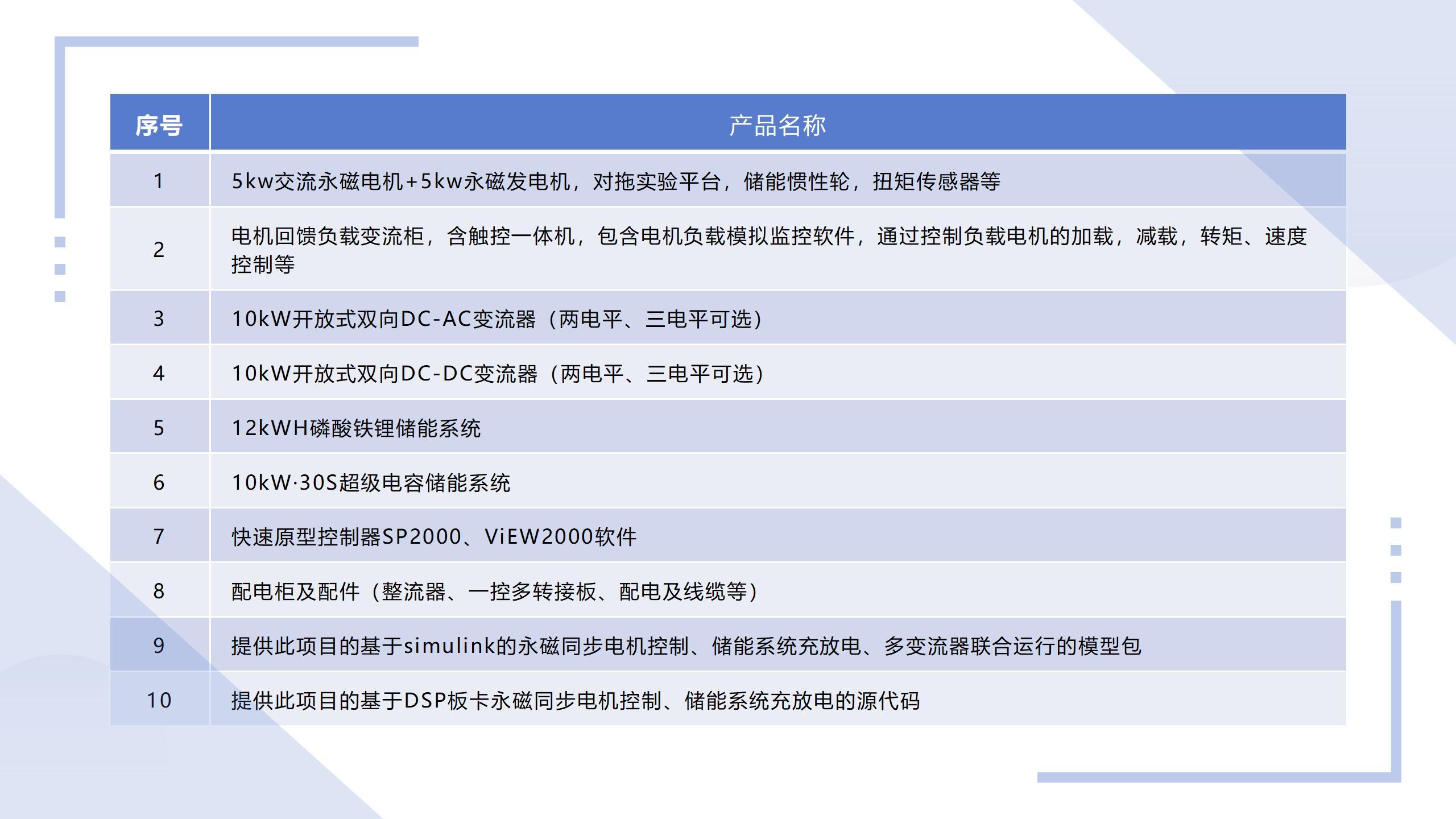
3.3 电机负载模拟监控系统
实现功能如下:
a.驱动电机转速/转矩控制;
b.加载电机转速/转矩控制的功率控制;
c.转速、转矩、功率数据和曲线显示;
d.实验数据存储。


监控区
软件监控区的数据来源主要有变频器、扭矩传感器采集系统的数据。
变频器数据
1)输出电压:变频器交流输出电压
2)输出电流:变频器交流输出电流
3)有功功率:变频器输出的交流电功率
4)实际转速:绝对值编码器经变频器模块采集计算后的电机转速
5)当前扭矩:变频器估算的扭矩
6)电机频率:变频器计算的当前频率
7)转速:扭矩传感器采集系统计算后的转速。
8)扭矩:扭矩传感器采集系统计算后的扭矩。
3.4 快速原型控制器——YXSPACE

YXSPACE产品系列能够将用户设计的图形化的高级语言编写的控制算法(Simulink)转换成DIDO、AIAO量,完成实际硬件控制。其基本控制框图如下所示:
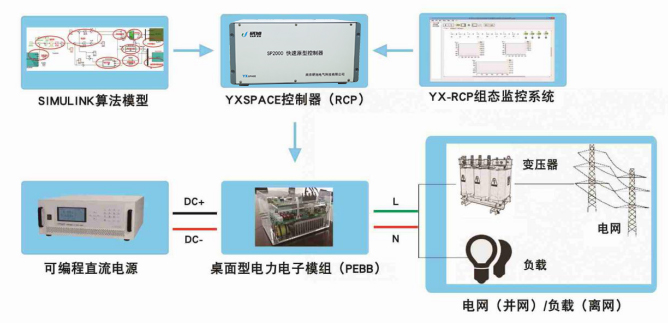
控制算法模型一般采用Matlab中的Simulink工具搭建,将模型中的接口与硬件驱动接口绑定后,再结合TI公司的CCS编译工具产生可执行文件,下载至YXSPACE控制器中运行。
研旭YXSPACE-VIEW2000软件主要用于配置YXSPACE控制器工作模式,同时可以实时监测控制过程中的各类运行量,包括采集量、中间控制变量等。YXSPACE-VIEW2000包括了6类组态控件,分别为遥控控件、遥信控件、遥调控件、遥测控件、示波器控件以及文字编辑控件等。用户可以借助这些控件,直观、方便的搭建监控界面,监控控制器内部运行的详细信息。
YXSPACE独特优点
- 采用目前市面成品常用的控制芯片作为CPU,其仿真结果针对实际研究更具有参考性;
- 在Matlab中设计的控制算法自动生成代码,自动加载到实时目标机中运行,避免了繁琐的编程和Debug工作
- 使用门槛低,会Matlab仿真即可完成实验测试工作,所有测试工作只需一人即可完成
- 模型与硬件接口链接简单,只需记住端口编号即可,更不用配置硬件各类细节,免去一切不必要的麻烦;
- 性价比高,在同等功能的前提下,YXSPACE成本更低。
- 具备自主编写的驱动库,可以直接导入到Simulink库中,用户可以直接在Matlab软件中拖动相应的硬件元件库,将模型中的数据直接与硬件对接,无需再花费时间去查询硬件映射。8种库文件,可适用于各种工程调试需求。
- 模型转换文件的透明化,用户可直接查看模型转换后的源码。
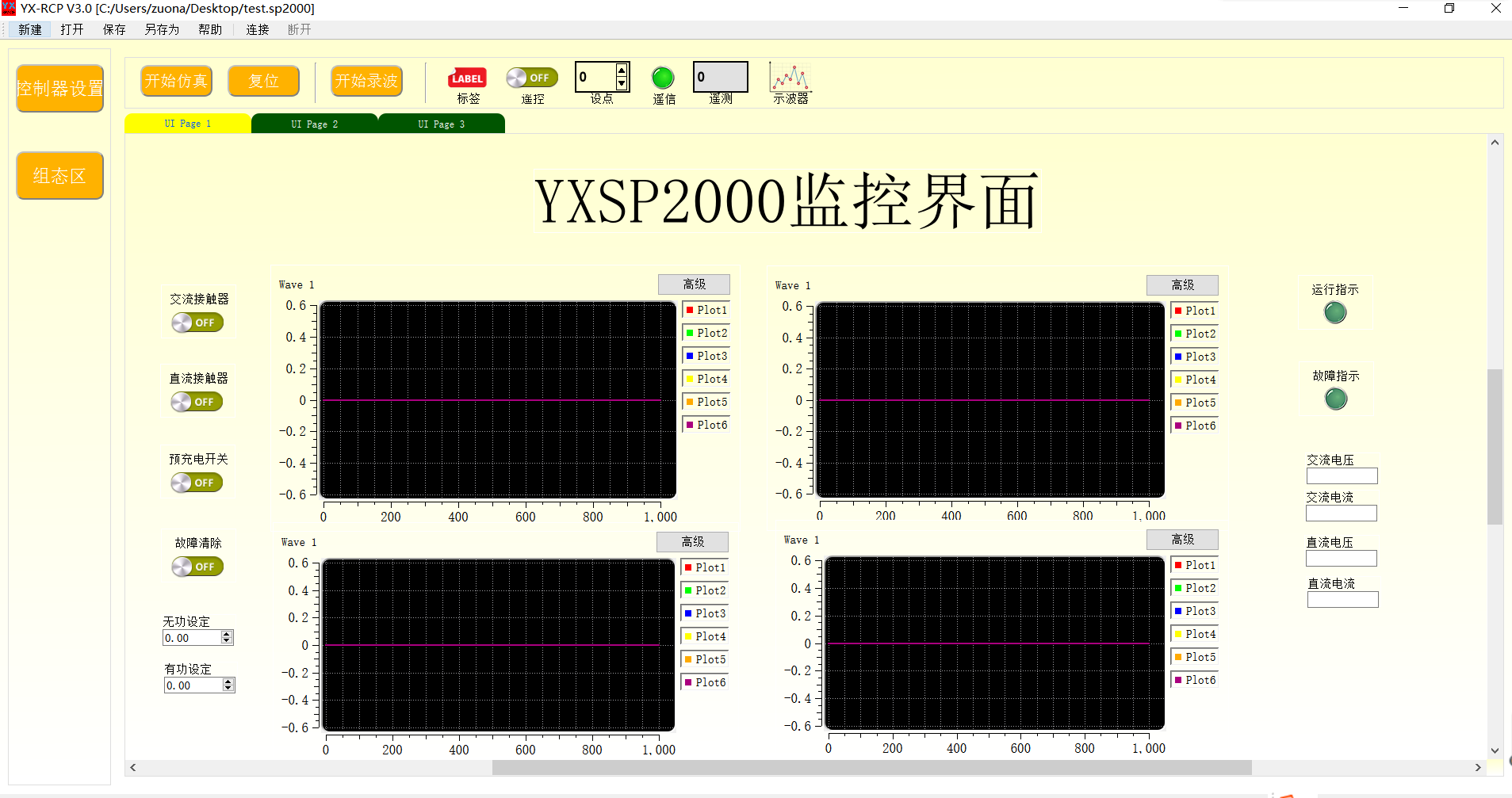
YXSPACE-VIEW2000软件
研旭公司专门为SP2000研发了一套上位机监控软件VIEW2000软件。
VIEW2000软件中包含控制器设置以及组态区。其中控制器设置界面共有4类控制器设置,包括仿真步长设置,DO控制源设置,QEP/CAP模式设置,PWM模块设置。

组态区主要包括功能按钮、组态控件、工作区等。
3.5 桌面型功率模块YXPHM
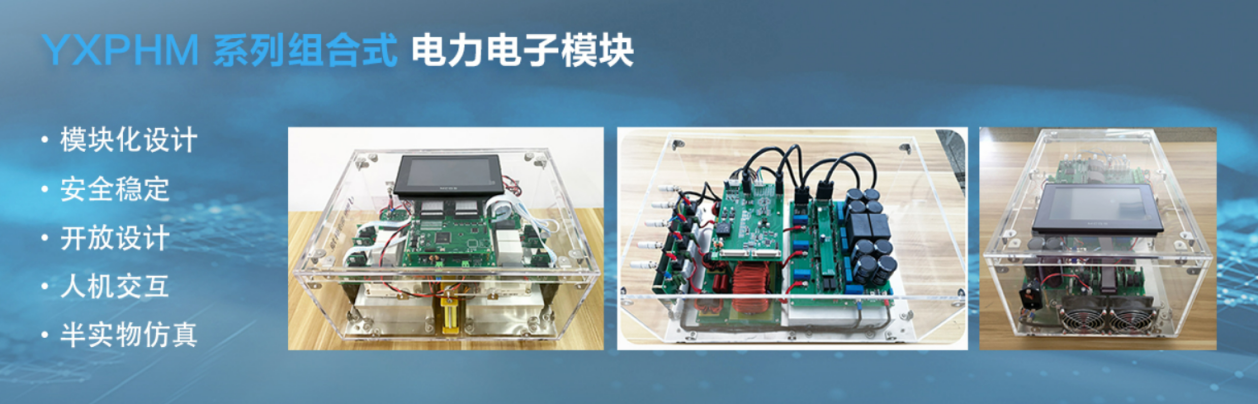
YXPHM系列采用基于模型设计的理念,脱胎于研旭成熟产品光伏并网逆变器与风机变流器等成熟产品,又结合了研旭多年的模块化组件与开放式平台研发经验,对该拓扑结构与驱动电路、传感器电路、信号处理电路进一步集成,同时提供实际控制器接口、快速原型控制器结构与实际控制器模块,为用户提供性价比更好的模块化产品。
YXPHM多功能桌面型电力电子功率转换平台,采用积木式搭建形式,将功率转换电路中的电感,电容,功率开关等器件方便的组合在一起,形成电力电子积木PEBB(Power Electronics Building Block)。
开发平台包括硬件部分、软件驱动,是针对高校开展电力电子技术研究推出的一种开放式的二次开发教学科研平台。该平台在硬件上采用分体化设计,控制板、采集板、功率板、电容板等模块化,外壳采用透明的亚克力板材,美观实用,用户可以方便观察内部的硬件结构。同时顶盖可以打开,方便进行相关信号的测量。
主要功能
1、模块拓展:采用模块化设计,用户可以定制所需要的拓扑,提供开源软件模块,用户可进行二次开发。可进行多种拓扑定制:
2、开放设计:开放给用户硬件原理图、硬件设计说明以及软件模块如底层驱动,控制算法等。
3、安全稳定:设计了健全的保护机制,软件方面有过压保护、欠压保护、过流速断保护、IGBT过热保护、通讯保护等;硬件方面有短路保护、IGBT过流保护等。
4、半实物仿真:方便与研旭YXspace控制器、NI控制器、RT-LAB控制器、dSPACE控制器等数字实时仿真器对接,可提供相应的数字转接板,免去客户硬件设计之忧。
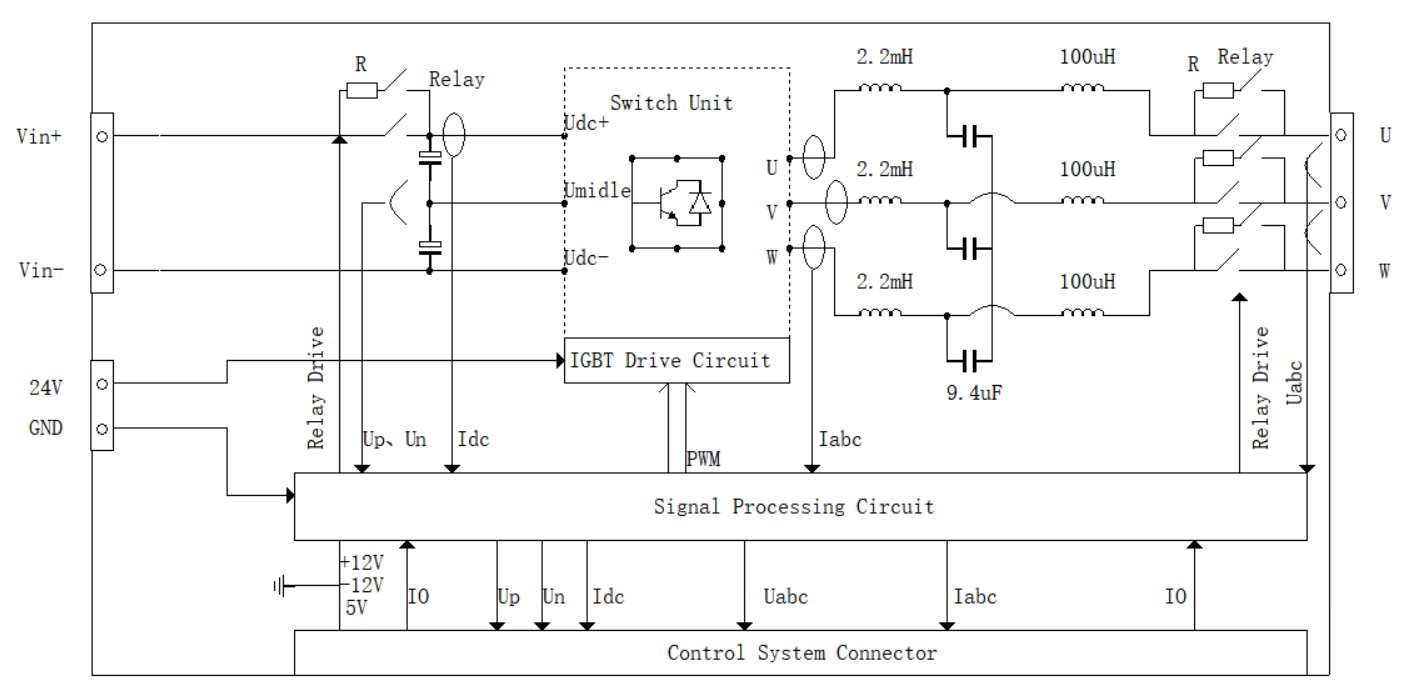
功能拓扑示例
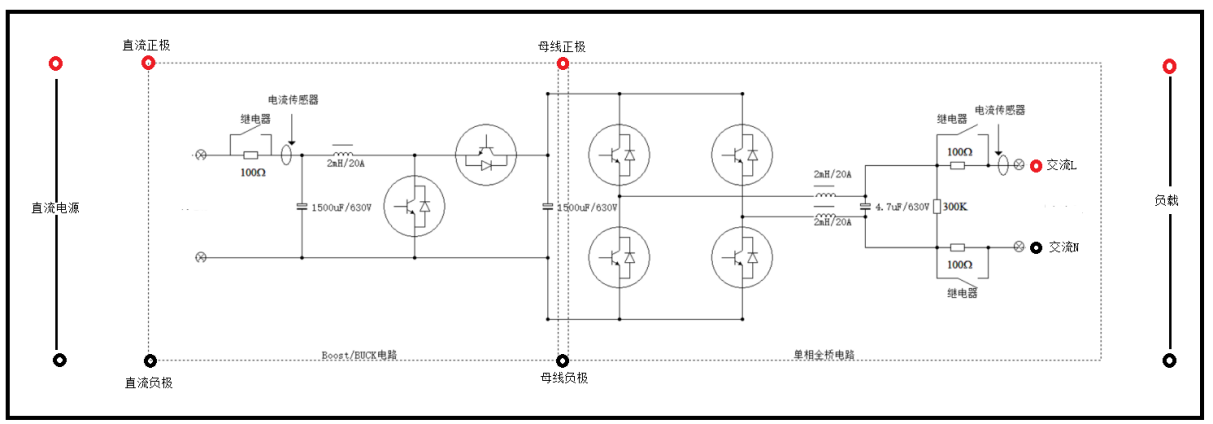
YXPHM-SP205b-II型变流器内部功能框图
图为接线面板:主控CPU采用目前流行的DSP,型号为TI公司的TMS320F28335,其32位浮点处理能力,非常适用于变流器控制场合。通过传感器分别采集三相交流电流、三相交流电压、直流侧电压、电流以及温度等信息送给DSP,然后DSP经过特定的算法,输出PWM调制波控制开关器件,从而可以实现直流变交流或者交流变直流能量双向流动。除此之外,信号处理电路还预留的外部控制器接口,方便对接RCP控制器,如DSPACE、RT-LAB、SPEEDGOAT、PLEX、YXSPACE等。

图为实物图片,采用亚格力材料封装。可以平放在桌子上面,故称作桌面型功率模块。
3.6、控制算法及模型
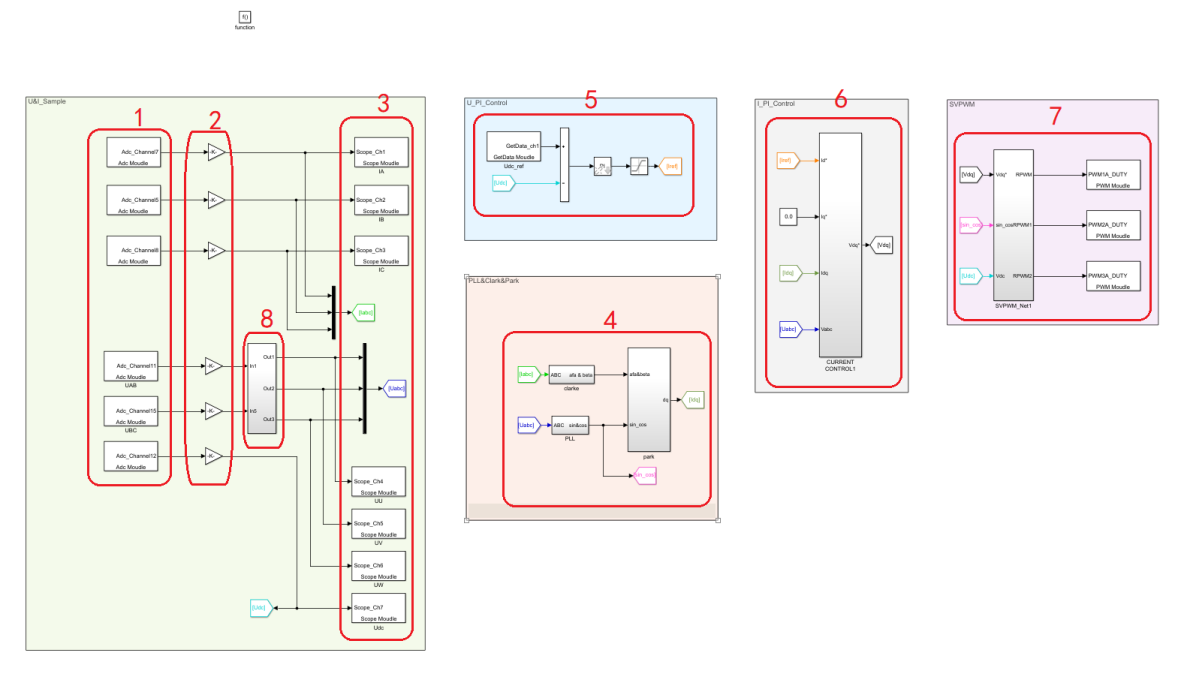
提供与此项目配套的Simulink仿真模型,该模型可以直接驱动功率硬件电路,实现功率变换。仿真模型需开放,用户可以直接在此基础上进行修改,便于二次开发。
配备相应的Matlab离线仿真算法模型一套,供用户进行基于模型的算法优化设计。

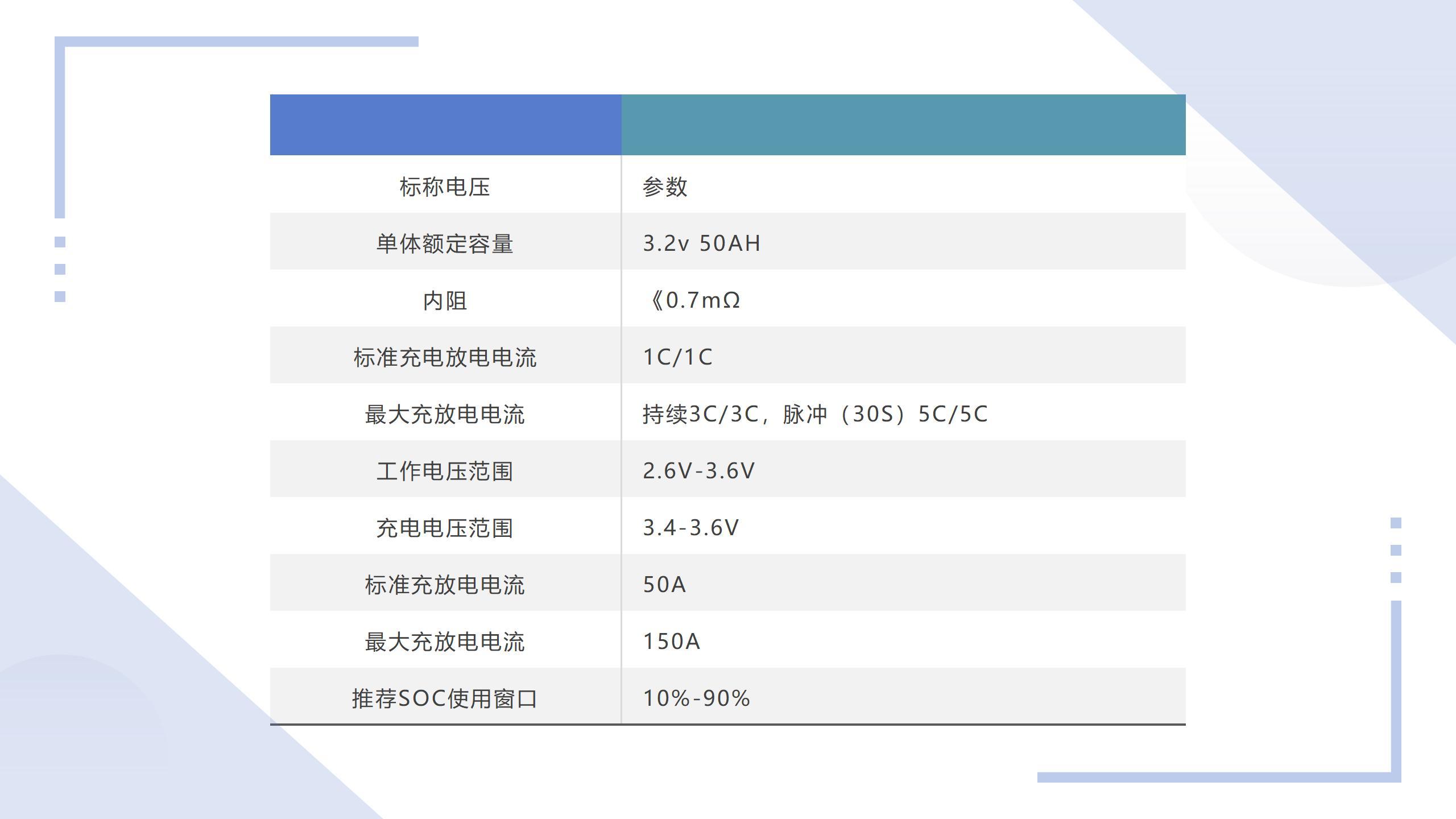
3.8 磷酸铁锂电池组(含BMS管理系统)
磷酸铁锂电池组由3.2v50AH锂电池模块组成,多个电池串联。
(1)产品特点
1)电池正极采用磷酸亚铁锂(LiFePO4)材料制作,安全性能好、循环寿命长;
2)电池系统采用高性能的专用BMS电池管理模块,该BMS具备电压、电流、温度等保护功能,并使用系统与主机良好通讯;
3)监控单元自动测量电池的充放电电流、充放电电压、单体电芯表面温度和环境温度;
4)二次下电功能,电池电压低于告警值有告警信息,电压过低时自动下电,保护电池;
5)系统具有良好的电磁兼容性;
6)全智能设计,配置有集中监控模块,具有四要(遥测、遥信、遥控和遥调)功能,实现计算机管理,可以通过与远端*监控中心通信;
7)电源控制技术与计算机结合,可以实时监测和控制各种参数及状态;
8)采用自冷方式,整个系统具有极低的噪音。
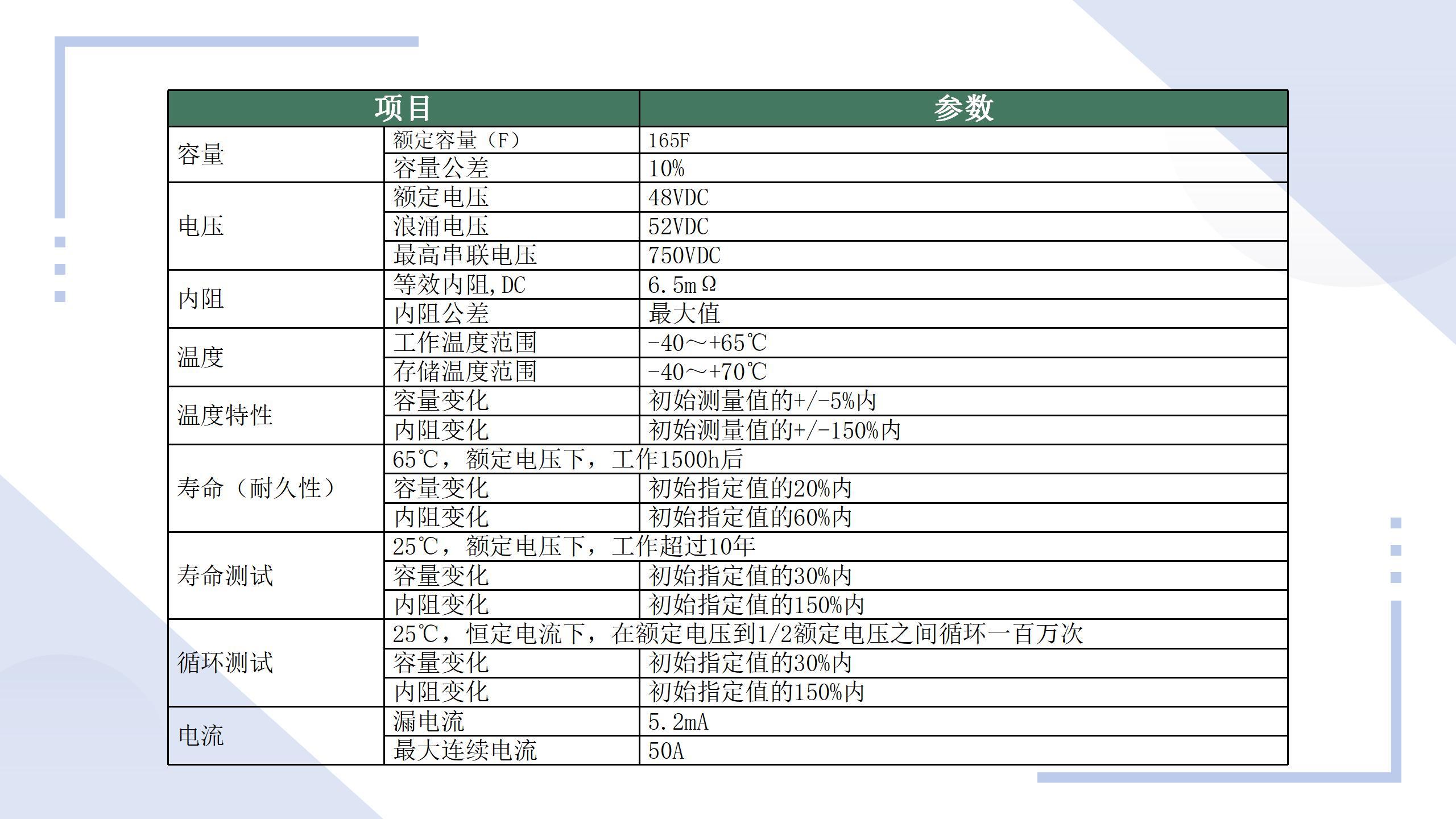
3.9 超级电容组(含CMS管理系统)
超级电容组是由多组48V,165F电容模块组成,可为系统提供瞬间功率支撑。
48V 165F模组参数
3.7 开源资料
1、提供变流器电路板硬件原理图:控制板,电源板,信号板,电容板,驱动板;
2、开放控制板的debug接口,客户可以烧写自己的程序;
3、开放变流器源代码代码(选配),包括但不限于程序主框架、硬件驱动功能、硬件配置功能、通讯功能、保护功能、编码器功能、采样功能、滤波函数、FOC控制算法等。(选配)
4、提供变流器的simulink算法模型,控制模型完全开放且可修改,用户可直接使用。
四、技术资料
1.设备使用手册
2.系统通讯协议
3.设备测试报告
4.开源资料
五、实物案例


相关新闻
恭贺研旭YX-PMP2000电机控制快速原型开发集成平台助力【东北石油大学】张老师团队发表高质量SCI论文
在永磁同步电机(PMSM)的矢量控制中,需要解决速度过冲和转矩脉动现象。电动汽车(EV)中 PMSM 的驱动控制有两个前提条件。第一是必须确保车辆的整体控制,第二是在保证电机稳定控制的同时,确保车辆控制的经济性。因此,本文首先提出了模糊分数阶指数收敛律滑模控制(F-CFSMC),它是以在线修正分数阶滑模面的指数收敛律为目的而构建的。它用参数明确表达了分数阶滑模面的到达时间和收敛速度。利用Lyapunov方程证明了 F-CFSMC 的稳定性。F-CFSMC 适用于具有不同参数的PMSM。接下来,引入了考虑电动汽车电池参数因素的模糊控制器,将锂电池和PMSM结合起来,以提高能量利用率。至此,双层次模糊分数阶指数收敛律滑动模式控制(DF-CFSMC)构建完成。此外,还使用 DF-CFSMC 和传统 PMSM 控制进行了比较仿真和实验,并在 PMSM 分层中得到了结果。在电动汽车分层应用中也进行了仿真,以显示 DF-CFSMC 的通用性、可重复性和优势。
研旭YXSPACE系列产品助力集美大学轮机工程学院发表优质论文:科技与学术的完美结合
[1] 论文名称:混合动力船舶直流微电网阻抗建模、参数灵敏度及稳定性分析 [2] 期刊名称:Electric Power Systems Research

微信公众号





